プリメイドAIの分解
プリメイドAIという、ダンスコミュニケーションロボットが存在します。
こちらのサイトでは、税込15万円で販売されているのですが、あまりにも売れなかったのか、一時期2万円ちょっとまで値下げされていました(一部機能制限はあるようですが)。
使われているサーボやしっかりした筐体など「2万円じゃ絶対赤字でしょ」という代物であることと、「ハッキングできんじゃね?」という猛者達の存在もあり、ロボット界隈で一気に火が付きました。
私も一台購入していたので、分解してみた、というお話です。
(ちょっと旬を逃した感はありますが…)
※なお、現在は完売御礼のようで、1,500台売り切りのようでした。
AIちゃん通常版1500台完売なりました!https://t.co/Nrn9AfUXK5
— Dr.GIY (@DrGIY) August 17, 2019
さっそく分解
まずは、胴体から手足を分離してみたのがこちら。
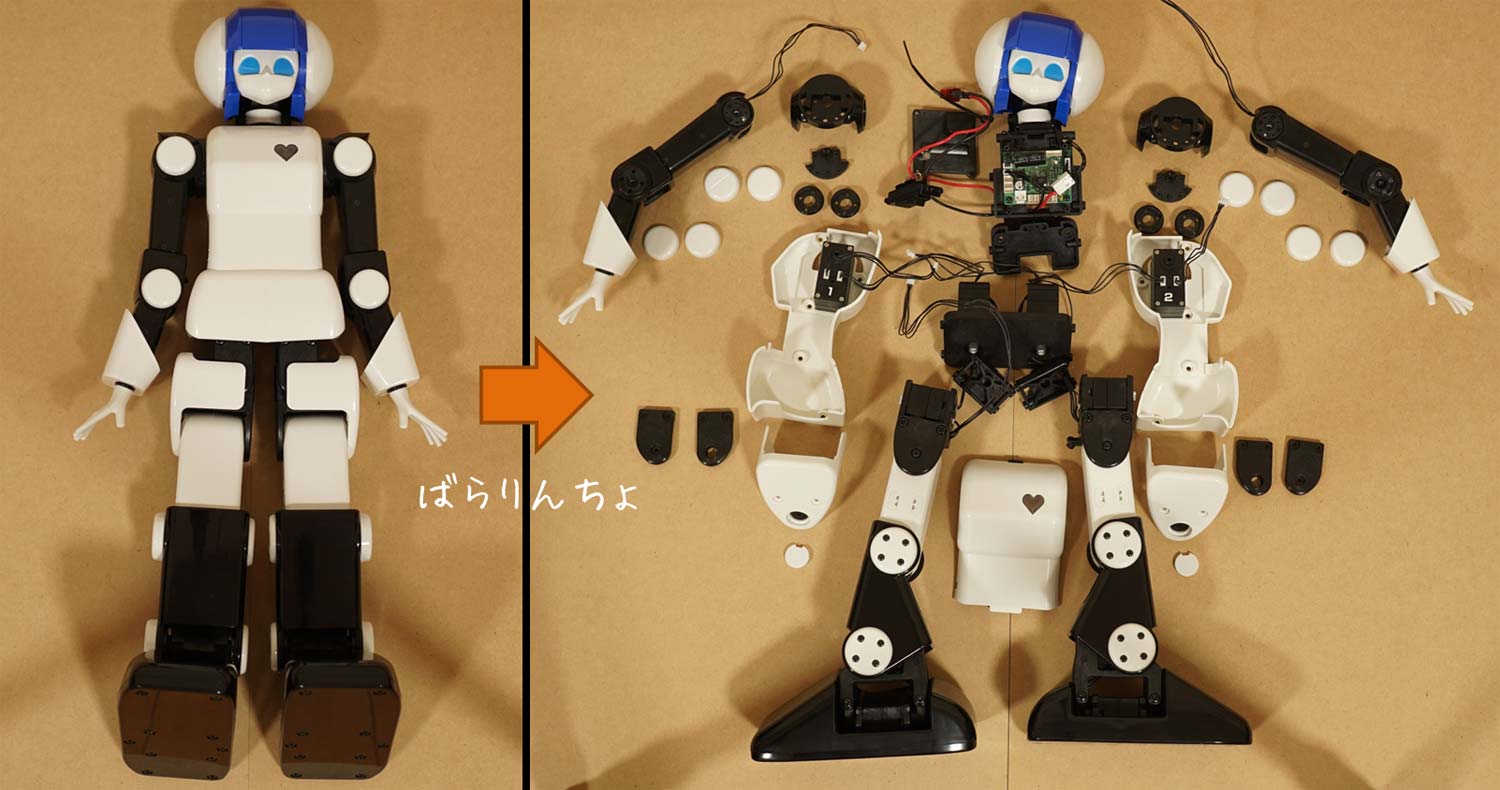
胸の部分にマイコンが入っていて、各手足とはサーボ用の信号線で接続されています。
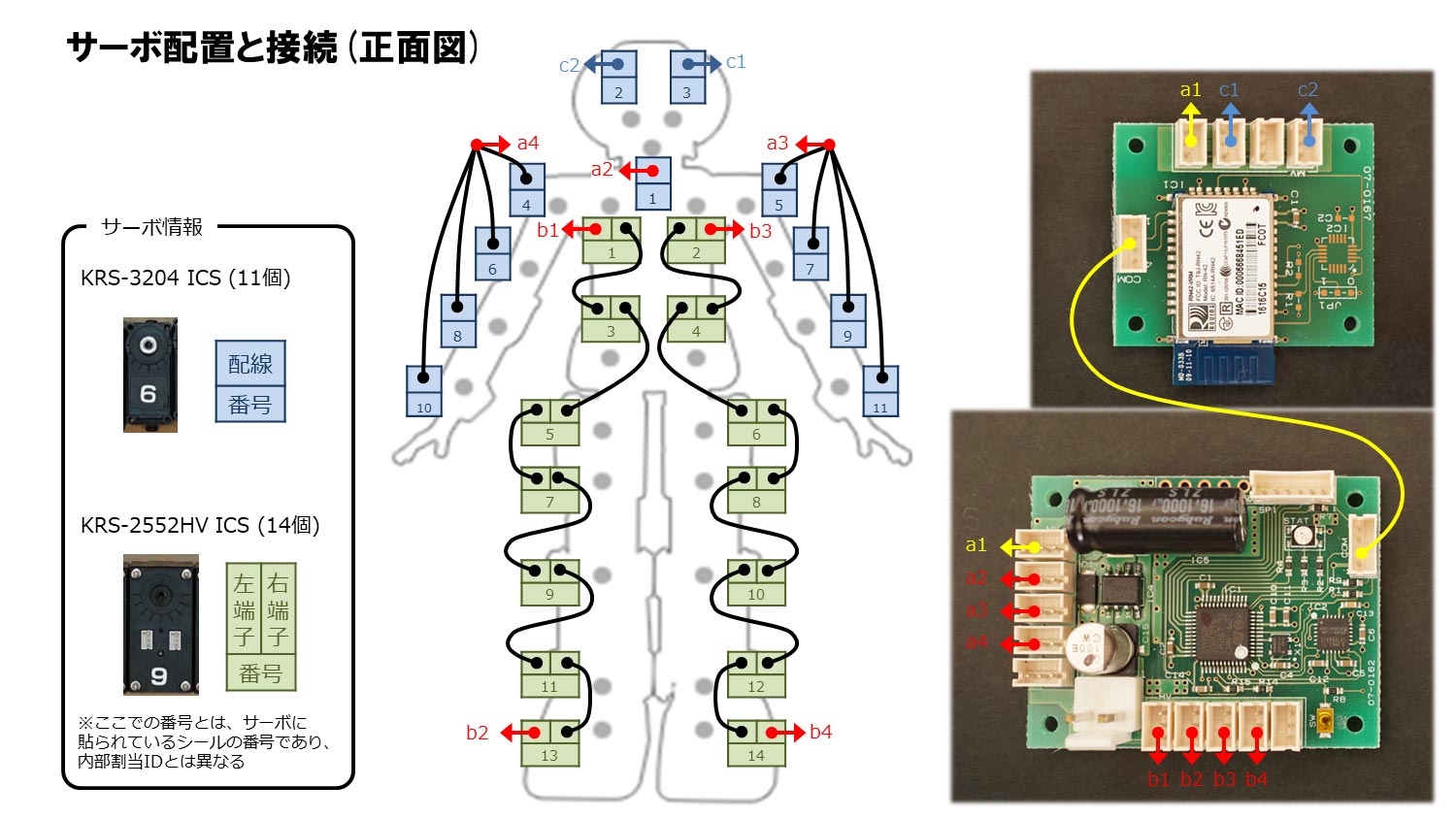
プリメイドAIに使われているサーボは近藤科学のKRS-3204 ICSとKRS-2552HV ICSらしいです。
普通、サーボはPWMで制御するのが一般的ですが、このような高いサーボになると、シリアル通信で情報をやりとりできます。(シリアルサーボと呼ばれます)
利点としては、デイジーチェーン接続によりマイコンとの信号線の数が減らせることと、より高度な情報を双方向通信できることです。
このため、今回のプリメイドAIも、手足にたくさんサーボが載っている割に信号線の数が少ない事がわかります(PWMサーボと比較した場合)。
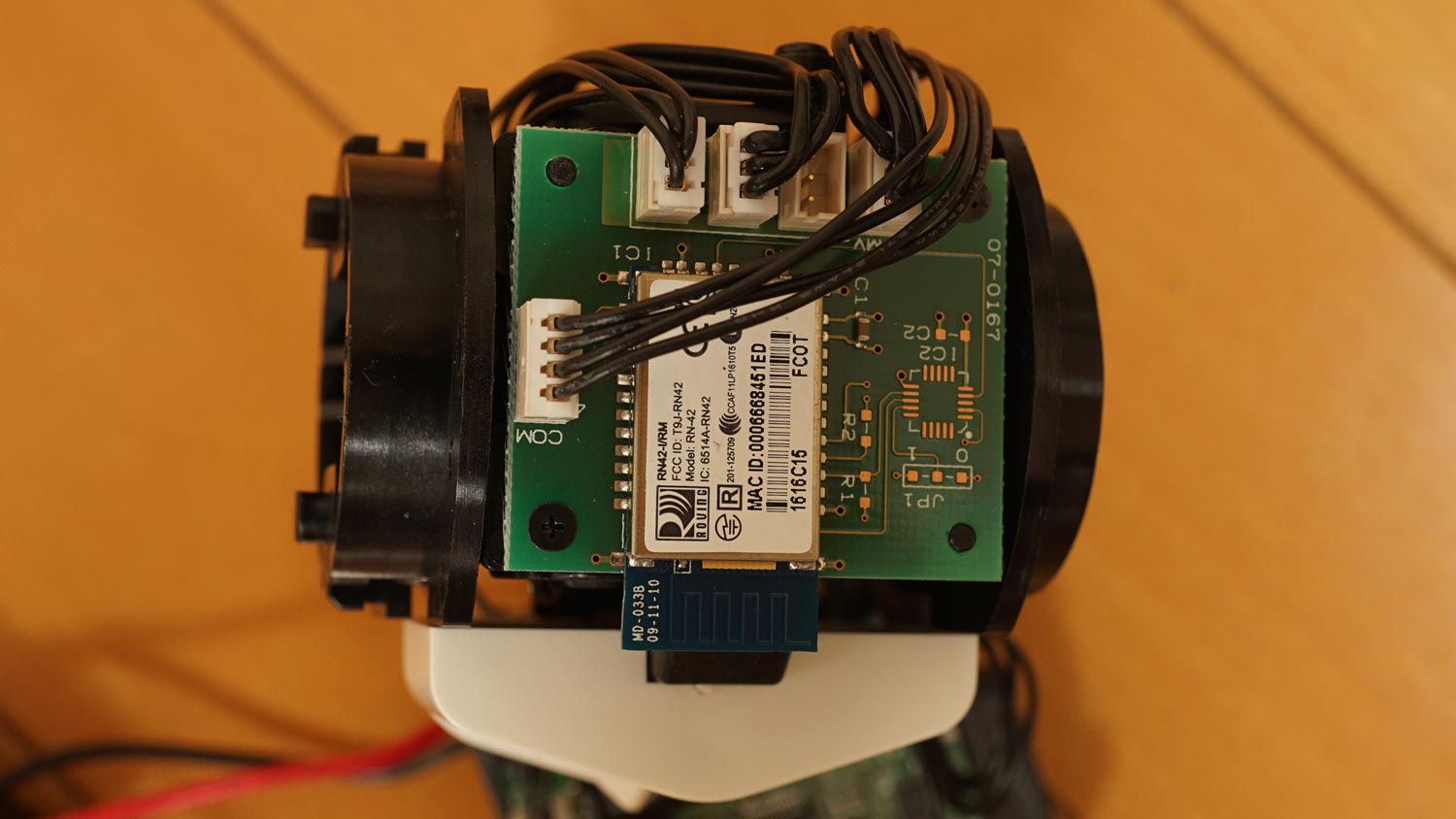
また、分解した結果、頭の部分にBluetooth用の基板が別途入っていました。
ということで、プリメイドAI内におけるこれらのサーボ配置とその接続をまとめたのがこちら。
さて、さらに分解を進め、筐体すべての部品を並べてみたのがこちら。
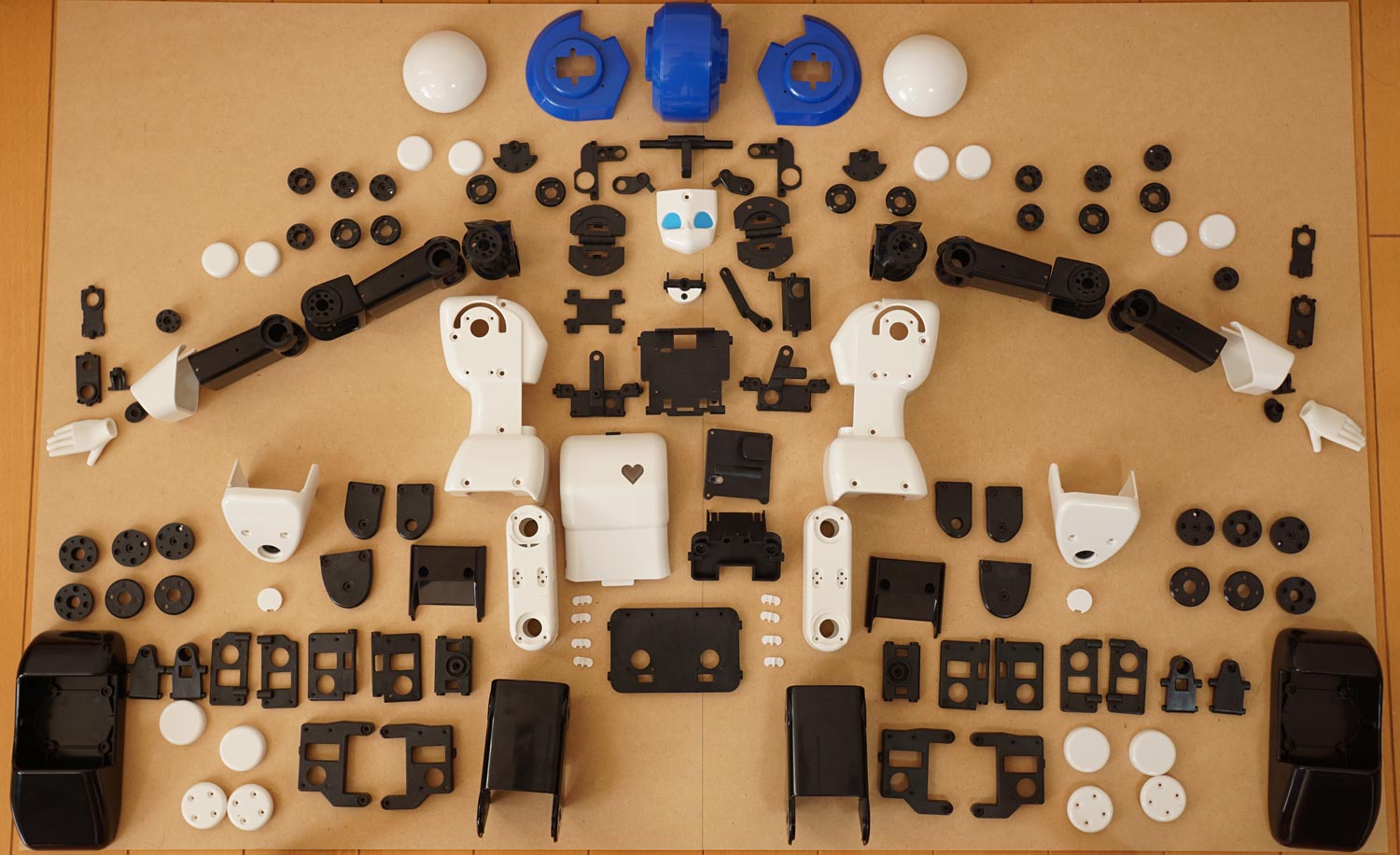
こう並べてみると、なかなか圧巻ですね。
電気関係の部品はこちら。
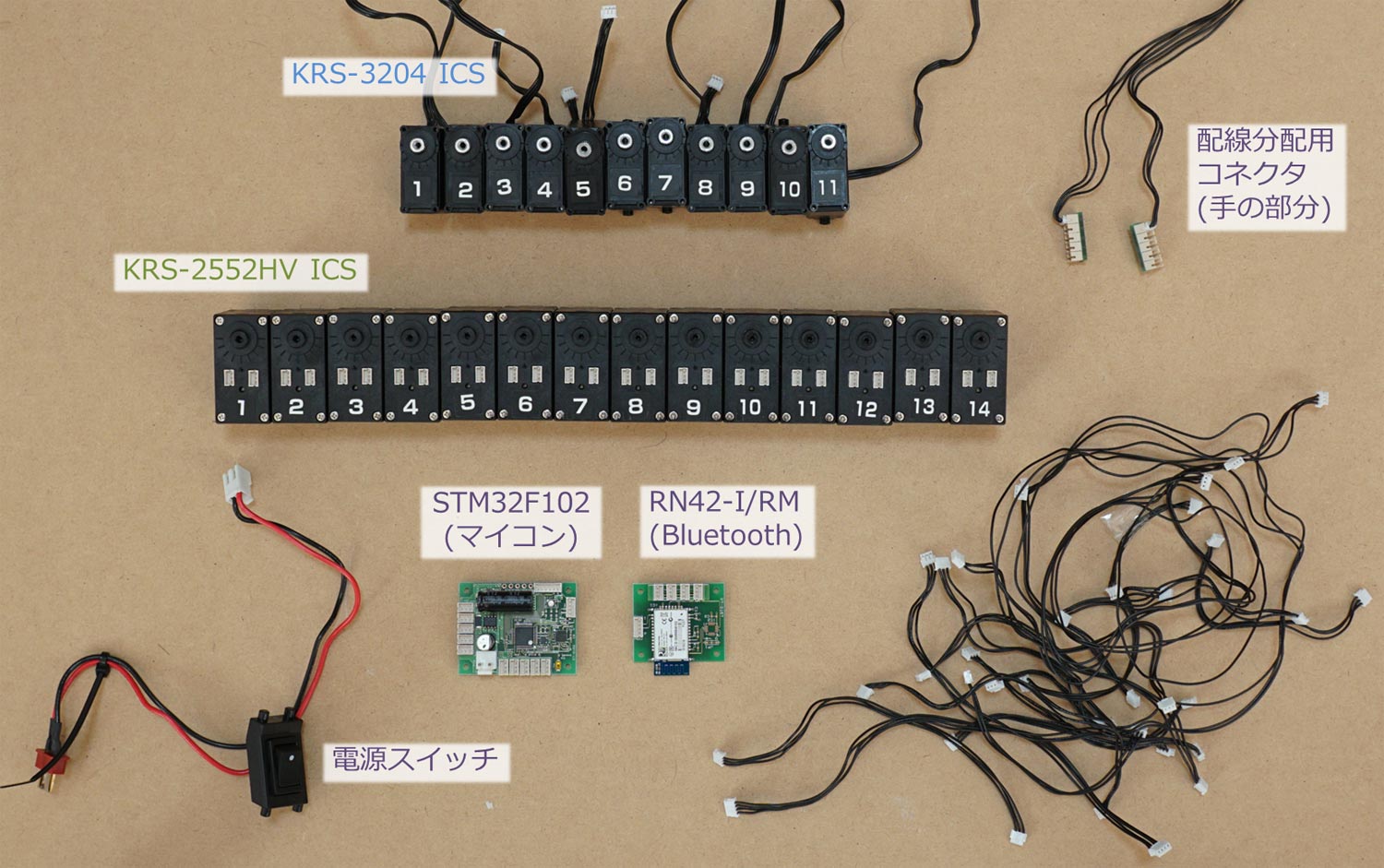
やはり、これも並べると圧巻のサーボ数ですね。
ちなみにお金の話をすると、6個セットで購入したとしても、KRS-3204が一個7,000円以上、KRS-2552HVが一個5,000円以上するので、個人で購入する分には、サーボだけでも余裕で元が取れてしまいます。
2万円という値段が、どれだけ赤字覚悟かがわかりますね…。
と同時に、本気でロボットやろうとすると、お金かかるんだなぁ…。(今まで500円くらいの安サーボしか使ってこなかったので…。)
そして余談ですが、近藤科学のサーボやホーンの3Dデータって、公開されてるのね…(こちらの公式サイト)。
回路を少し調べる
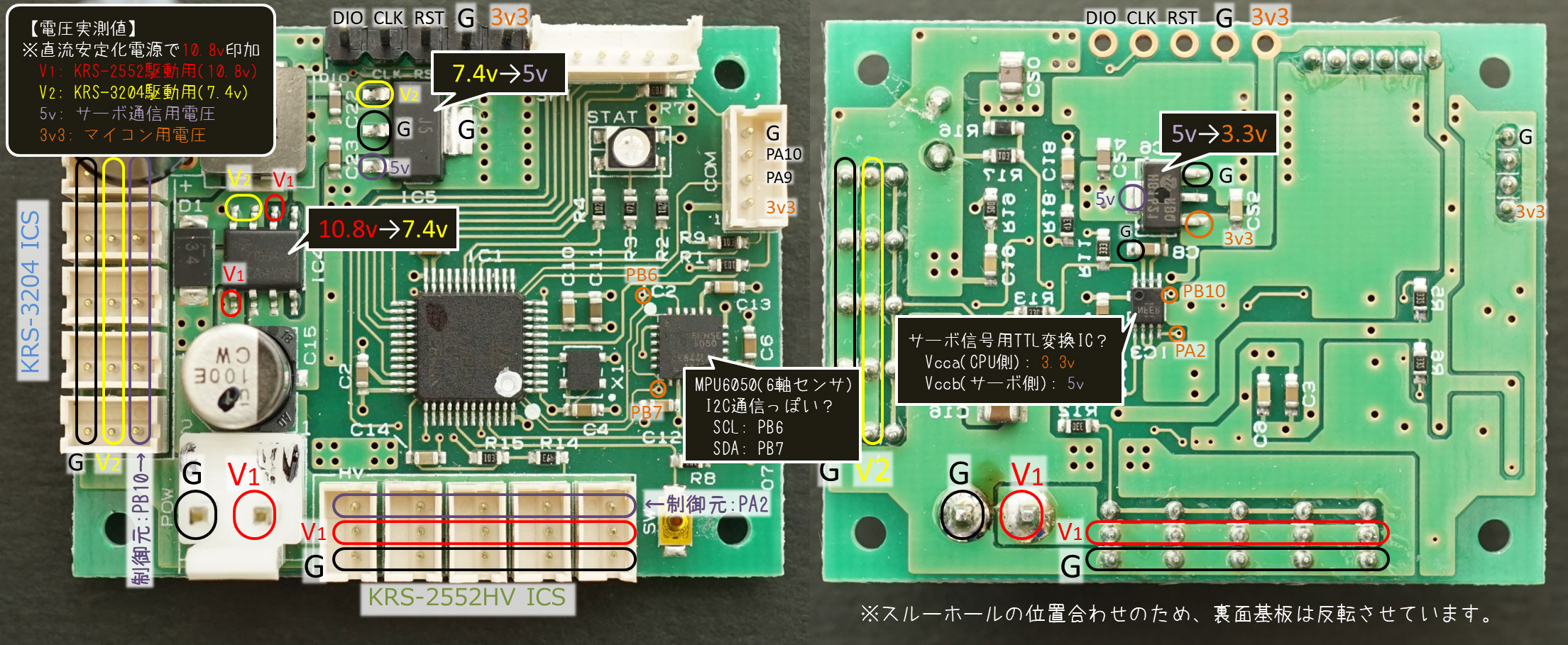
3つのレギュレータを使って、4つの電圧(KRS-3204駆動用、KRS-2552HV駆動用、サーボ通信用、CPU用)を作っているようです。
また、PA~やPB~は、メインマイコンであるSTM32F102への接続端子名を表しています。
間違ってたらごめんちょ。自己責任でお願いします。
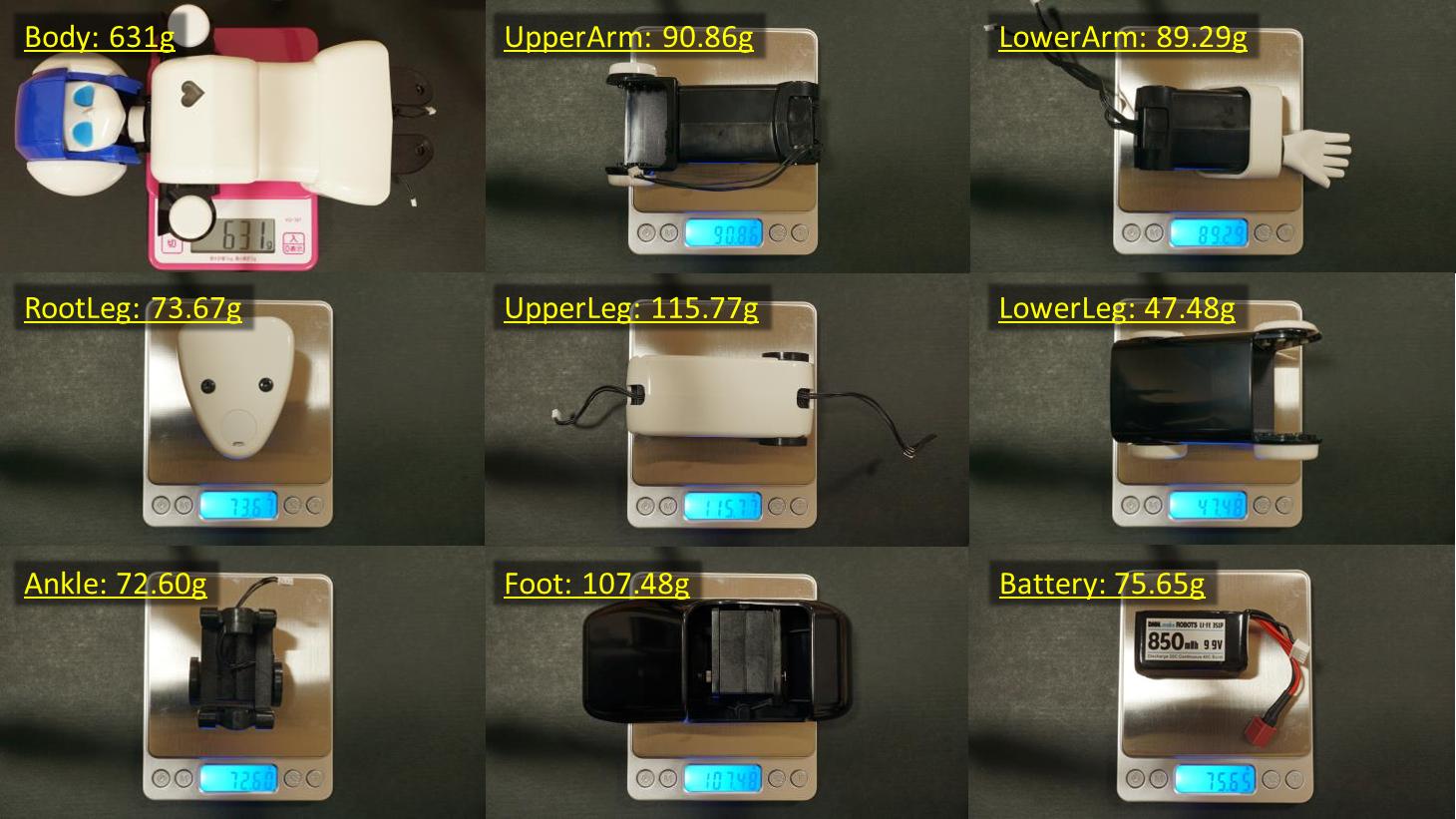
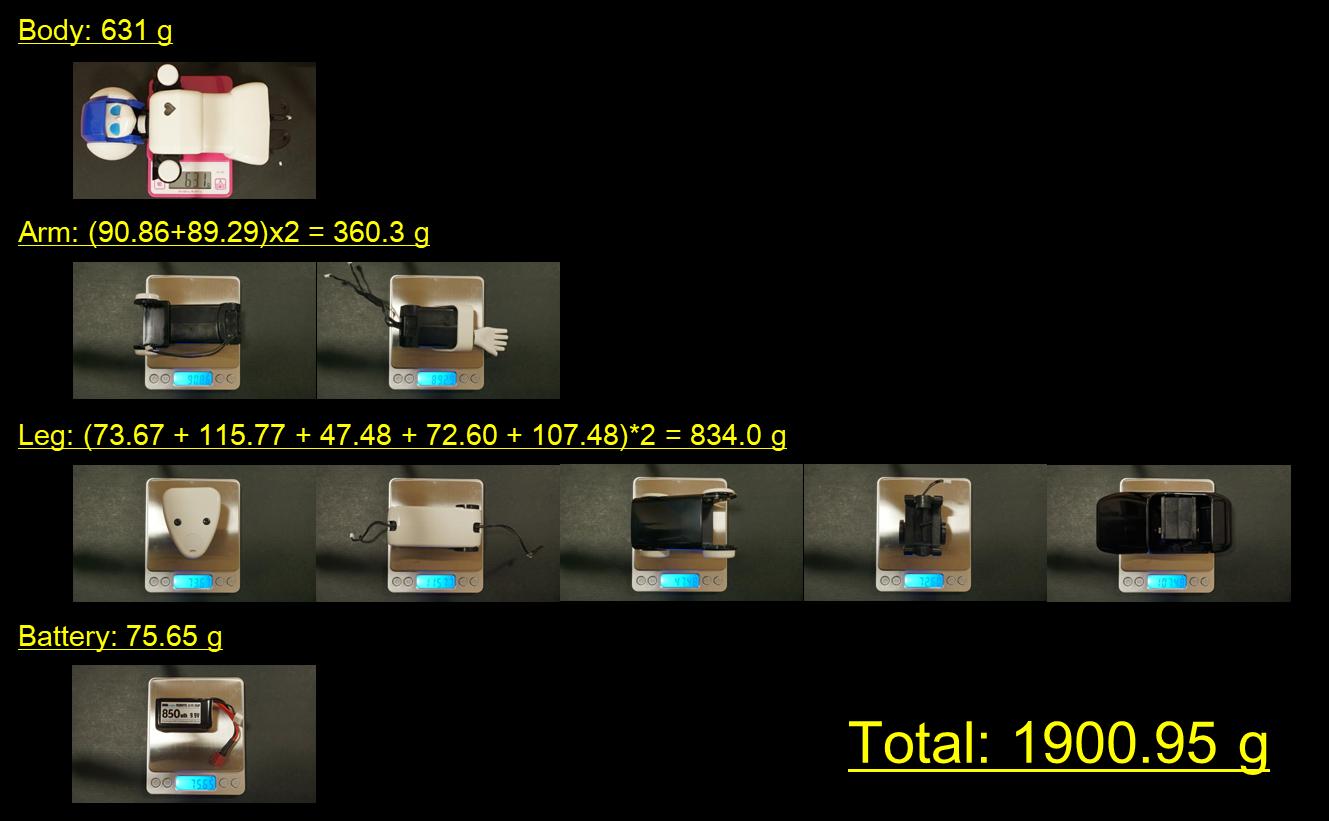
各リンクの重さ
重心計算をするため、各リンクの重さと重心位置を計測してみました。
(重心位置をうまく表現できなかったので、とりあえず重さの情報のみ記載しときます)
プリメイドAIの改造情報
冒頭で述べた通り、プリメイドAIを改造してやろうという猛者たちから、色々と有益な情報が提供されています。
改造の部分では、こちらのgithubのdevemin様が、「プリメイドAIのメインマイコンであるSTM32F102を独自のファームで書き換えちゃうぜ」というコンセプトでやられています。
他の有力な情報もまとまっているので、これからマイコン書き換えレベルでいじっちゃうぜ!という方は、とても参考になると思います。ありがとうございます!
おわりに
今回、初めて人型のロボットを分解してみたため、関節機構やサーボの組み方など、とても勉強になりました。
「すげー!こうやってサーボを組むのかぁ!」と興奮しながら分解していたため、分解中の写真が少なめ…。
次回作は、これらのサーボを使って、少し大きめの作品を作ってみたいなぁ、なんて思ってます。
シリアルサーボを使ったことがないので、まずは制御方法から調べてみようかな。
ということで、また次回をお楽しみに。