成長した「AIさん」のデバイス構成
今回は、「AIさん」のベースとなる「プリメイドAI」に対して、追加・変更を加えた機構・デバイスについて、解説したいと思います。
各モジュールの接続図
成長したAIさんにおける、各モジュール間の接続は以下のようになっています。
(オレンジ枠のモジュールが、今回成長した部分になります)
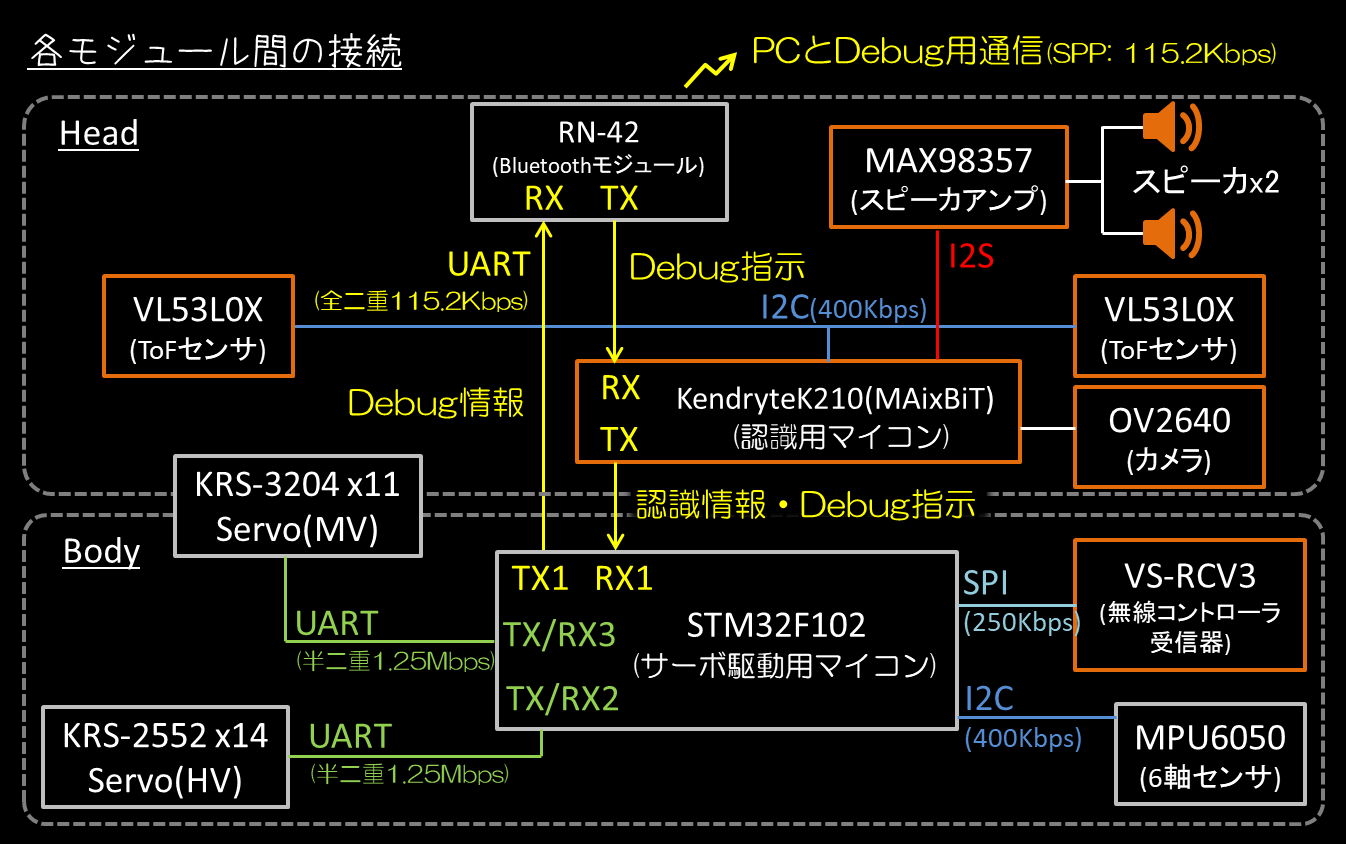
手を入れた部位としては「頭部・胸部・足部」の3か所ですが、この図から分かる通り、最も成長したのは頭部になります。
まさに、頭が良くなった感が出ますね!(でてるか?)
頭部: マイコン・カメラ・ToFセンサ・スピーカの追加

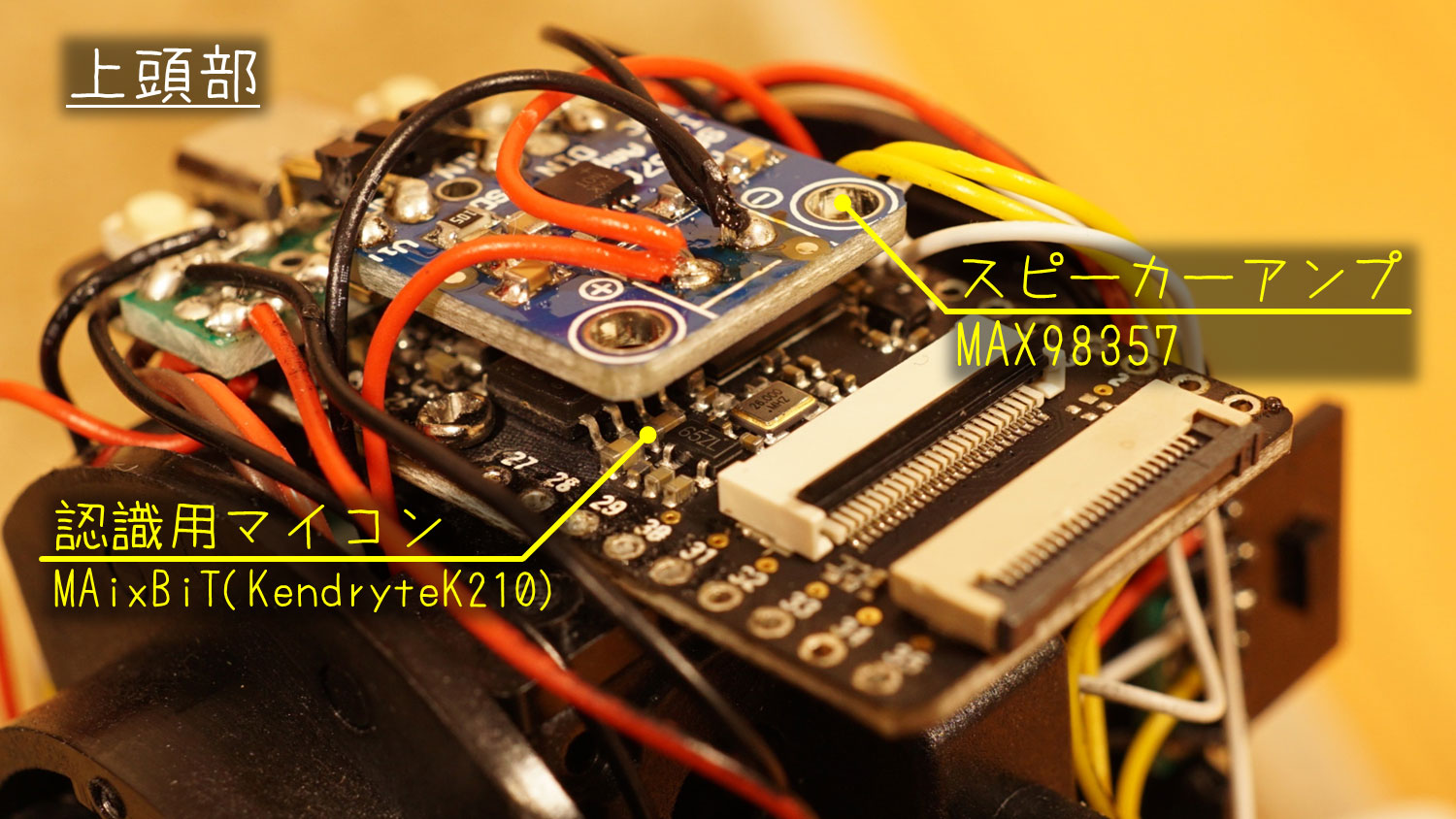

頭に頑張って収めるため、配線がすごいことに…。こんなんでもI2C通信やUART通信を含めてちゃんと動いているので、結構いけるもんだなぁ。
画像認識用のマイコン・カメラの追加
画像認識による物体検出の実現に向け、元々Bluetoothモジュールが配置されていた場所に、Sipeed社のMAixBiTを搭載しました。
(Bluetoothユニットは、後頭部へ)
この開発ボードには、最近はやりのニューラルネットワーク演算専用ユニットが搭載されており、Yoloを使った物体検知をリアルタイムにおこなうことができます。
(以前MAixBitを調べてみた詳細記事はこちら)
また、画像入力に必要なカメラは、フレキの長い魚眼レンズを採用し、おでこの先に穴をあけて取り付けています。
耳にToFセンサ
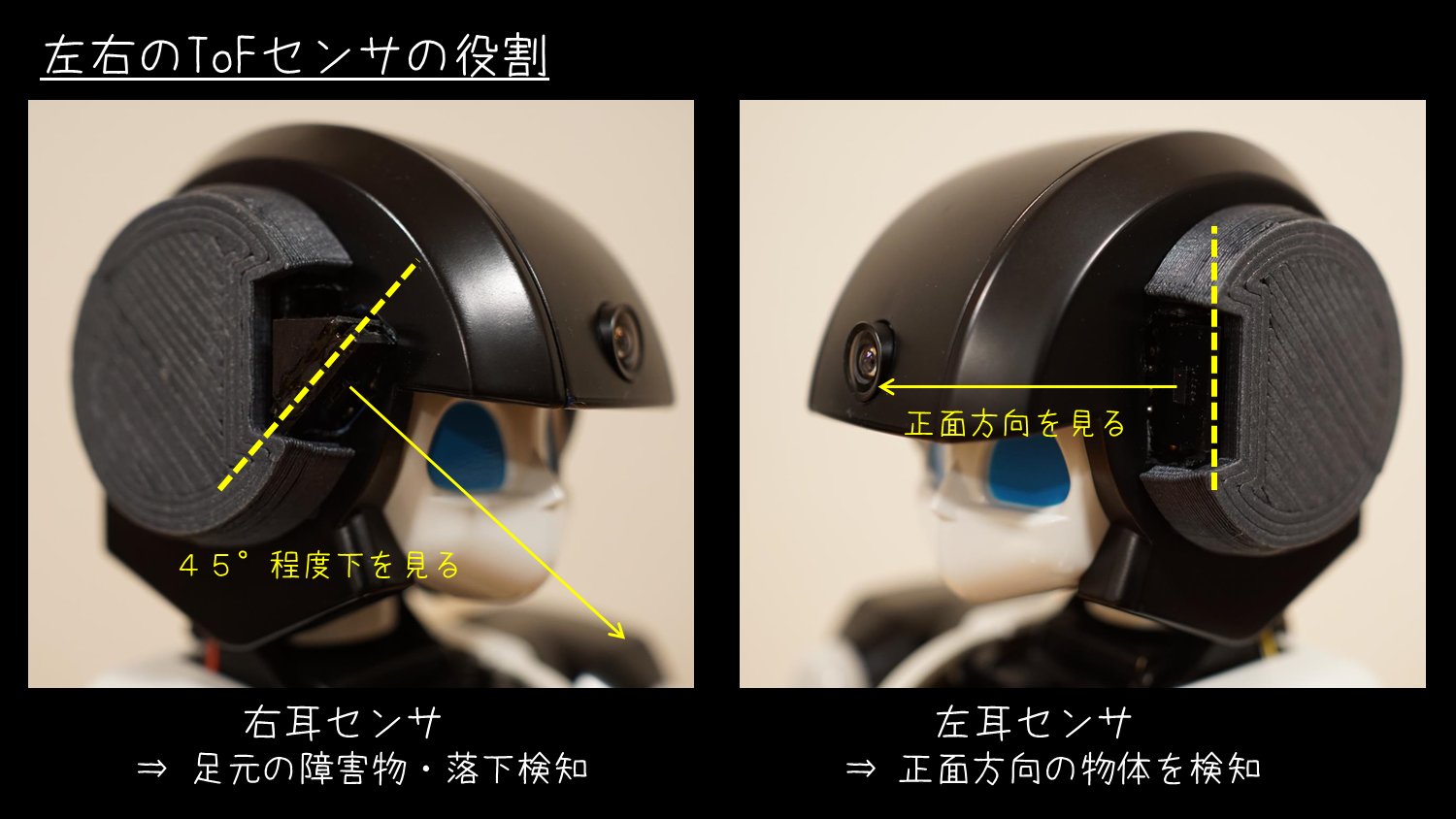
左右の耳にはそれぞれToFセンサを1つずつ組み込み、それぞれ足元と正面の物体を検知できるよう、角度を変えて取り付けています。
また、耳パーツは3Dプリンタで製作し、頭パーツは黒ラッカーで塗装しました。
顔内側にスピーカx2
おしゃべりできると楽しそうだなぁ、という思いから、I2S接続のアンプとスピーカーを2機搭載しています。
今後、音声認識用にマイクも取り付けてみる予定です。
胸部: リモコン受信基板の追加
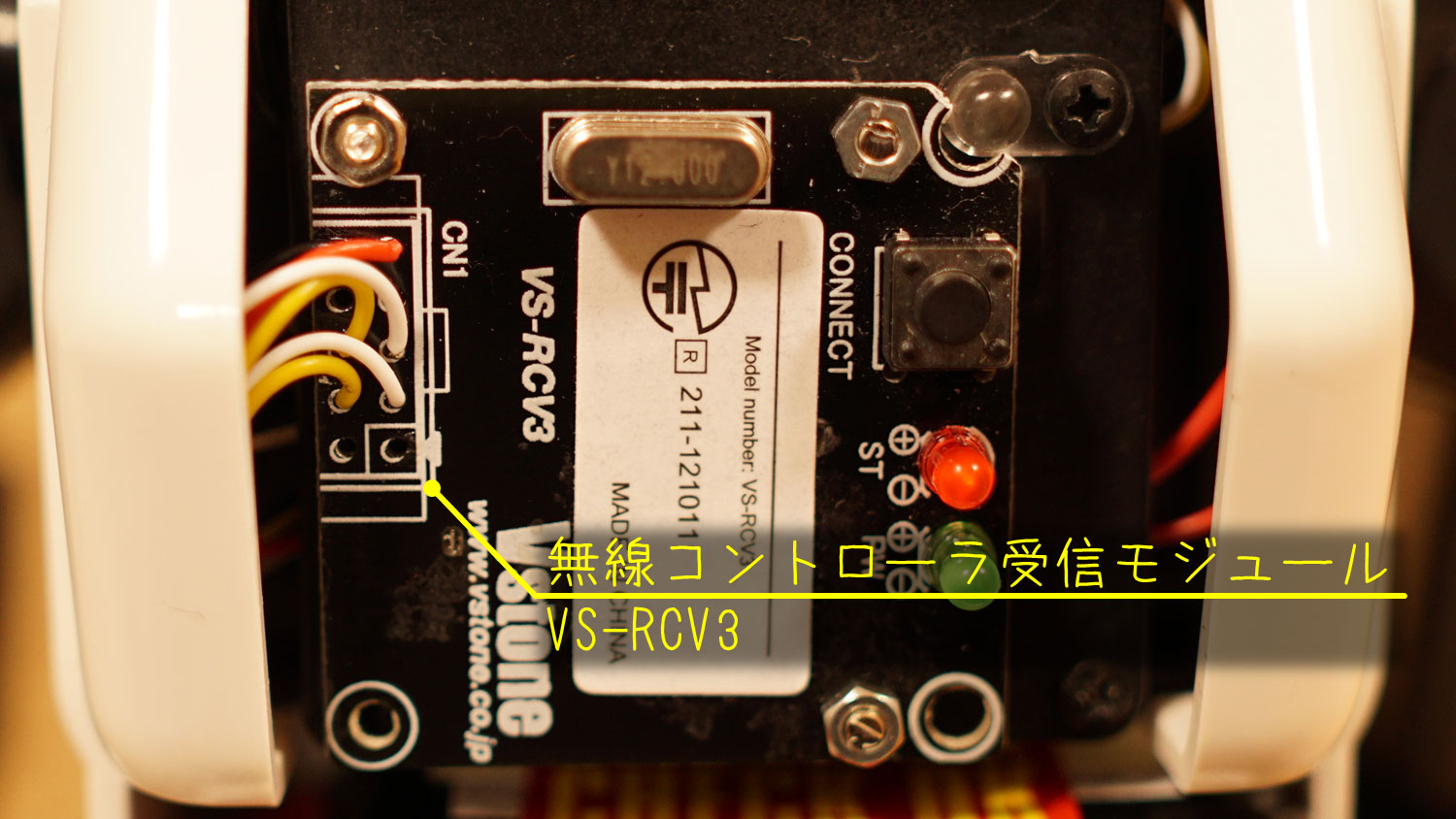
無線コントローラを使った操作を実現するため、受信モジュールを取り付けました。プリメイドAIの制御基板に元々用意されている拡張用SPI端子につなげて通信しています。
近藤科学さんとVstoneさんの、絶妙なハーモニーがここに!
(使用コントローラ: VS-C3)
足部: 小さいサイズへカット

元々ついている足は足裏が大きすぎて、あまり歩行には向かないように感じたため、前後をひっくり返して後ろをカットしました。
また、ROBO-ONE autoへの出場規格を満たすため、さらに小さい足裏をMDFを削って作りました。
おわりに
今回は、AIさんのデバイス構成を紹介してみました。
今後もちょいちょい改造する予定があるので、変更が入る可能性がありますが、少なくともROBO-ONE autoに挑んだ際の構成はこの形になります。
(唯一、スピーカーが全く生かされていませんでしたが…)
今回の育成で一番苦労した点は、なんといっても「元のプリメイドAIのフォルムを崩さずに、どれだけ色々詰め込めるか」という点でした。
見えないところでAIさんの部品を削ったり穴をあけたりと、なかなか苦労したものです。機会があれば、この点についても別途触れてみたいと思います。
ということで、今回はAIさんのデバイス構成の紹介でした。また次回をお楽しみに。