フォロ君成長日記1「GoogleHomeとの連動」
前回の記事で、フォロ君の制御アルゴリズムをなんとなく解析してみました。
今回はやっと改造に着手し、基本となる部分が完成したので、動画にしました。
なんとこのフォロ君、おしゃべりもするし、GoogleHomeとも連携できてしまうのです!(ドヤ顔)
これらをどうやって実現しているか。実は、中身はこちらのドロイド君の流用が多くを占めています。(やっぱりそうかー、という声が…。起動シーケンスとか一緒だもんね)
なので、今回は部品の選定やソフトウェアの部分はあまり苦労しませんでした。
うーむ、ドロイド君開発で得た知識が、フォロ君にも生きるとは。技術が身になっている感じがして、とても感慨深いです。
しかし、苦労が何もないわけではなく、今回は「いかにして回路をフォロ君のボディに収めるか」が大きな問題でした。
フォロ君、フォルムがとてもかわいいので、外見を全くいじらなくていいよう、どうしても中に収めたかったんですよね。
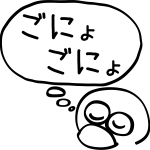
そして、結果的にはこんな感じで、頭の部分に全ての回路を入れこんでいます。
頭の中のスキマを少しでも活用しようと、ぐるっと基板を張り巡らせる構造になりました。メインマイコンは、ESP32です。
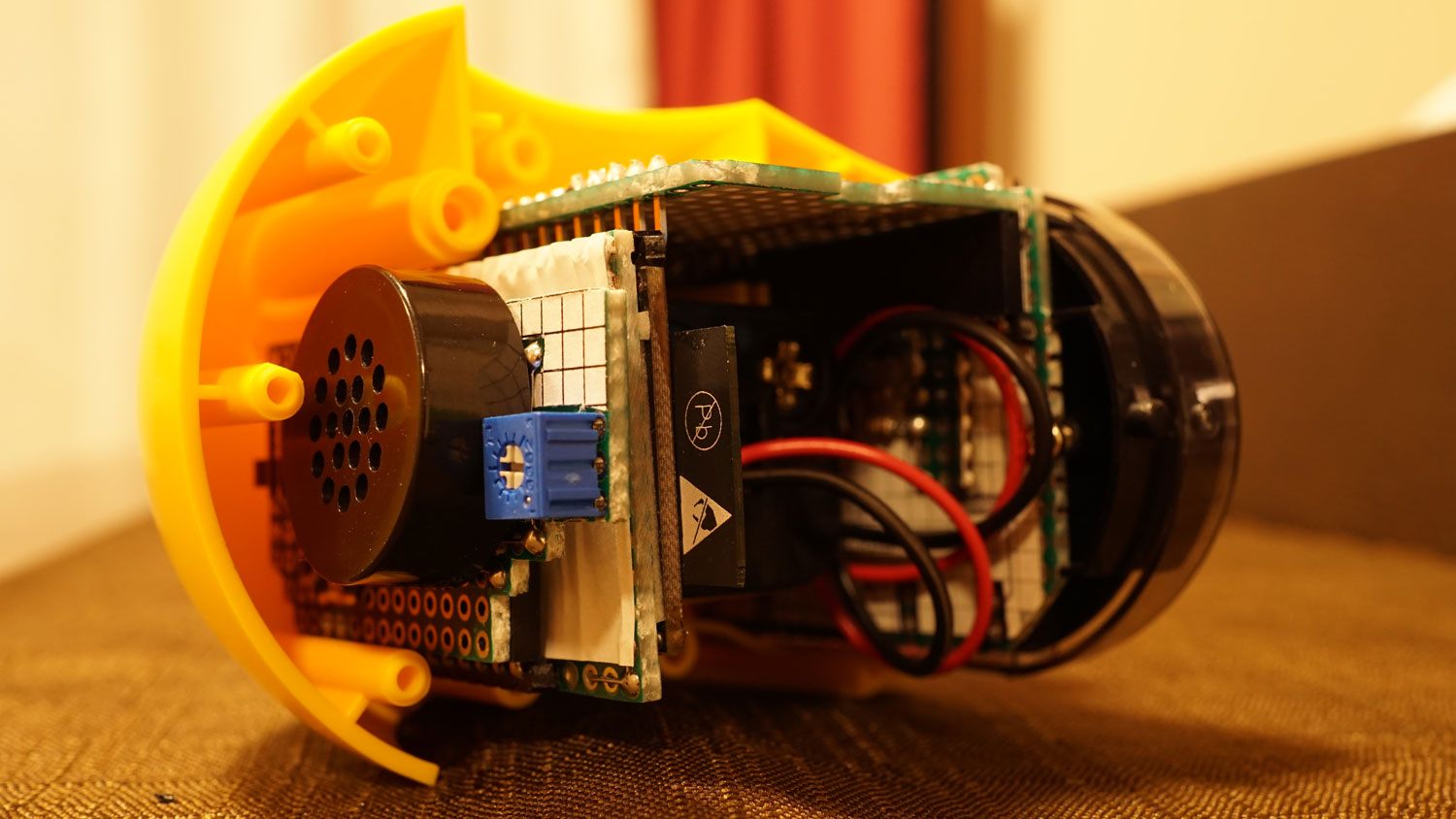
ちなみに、元のフォロ君はこんな感じです。
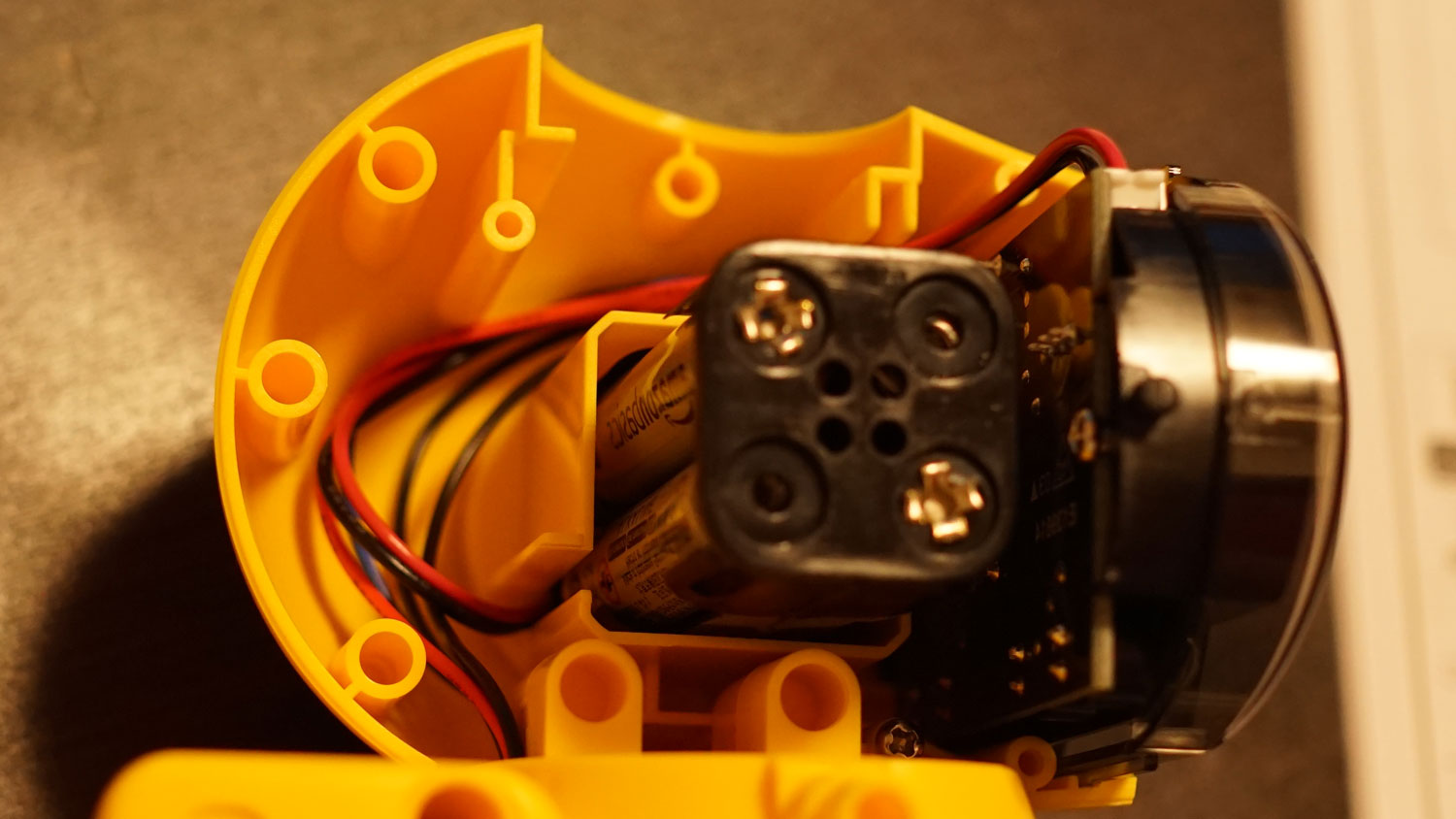
ありゃ、結構なスカスカ君です。
しかしこれには理由があって、元々フォロ君は、自分で部品を組み立てるキット型の商品なのです。なので、誰でも作れて、かつ頑丈な作りになるよう、あえてこういう構造なんだと思います。
今回の改造で脳みそが詰まって、見た目的にも賢くなった感がでたかしら。
さて、他にも開発しやすいよう、工夫した点がいくつかあります。
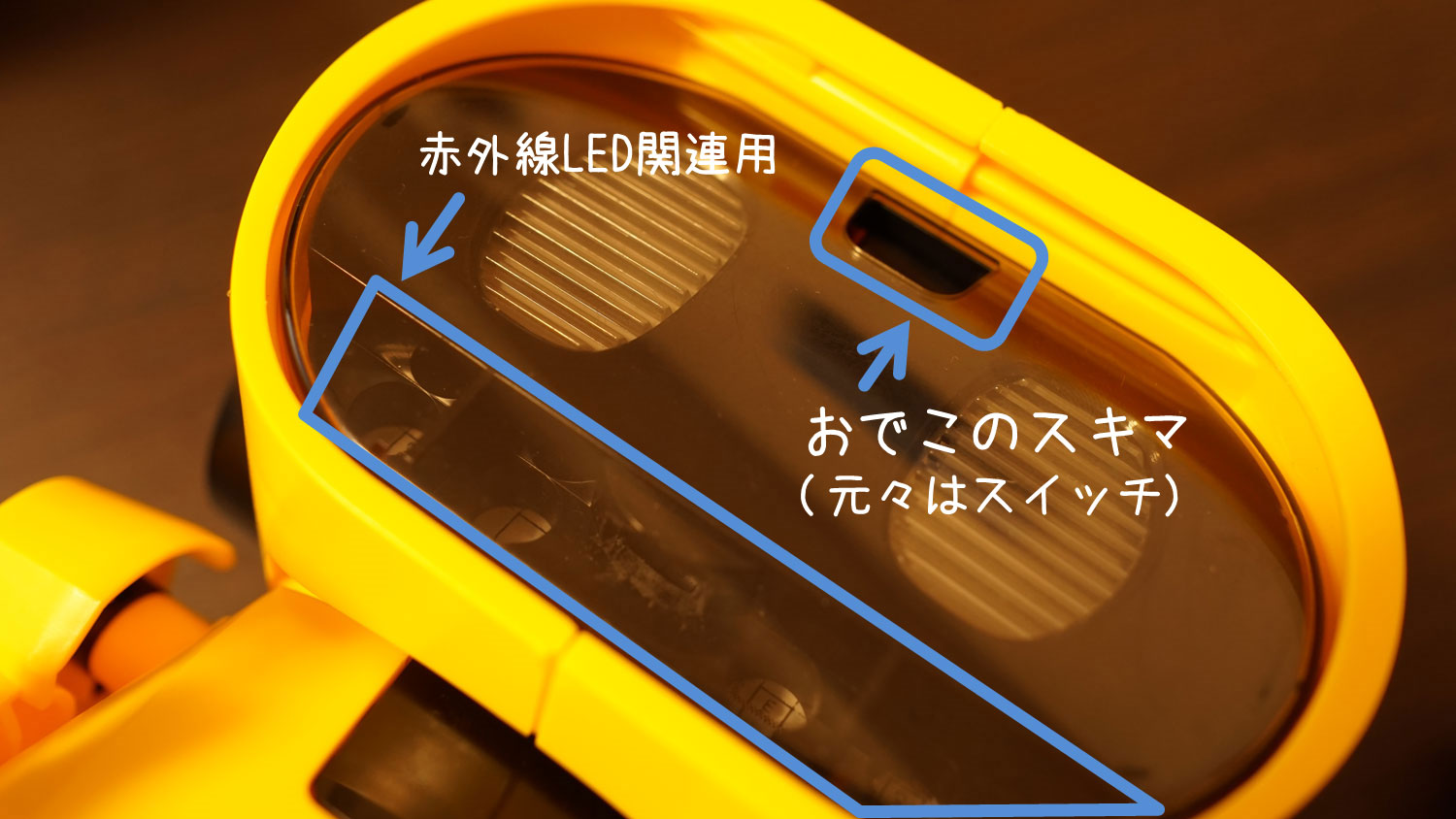
まずはアクセスポート。
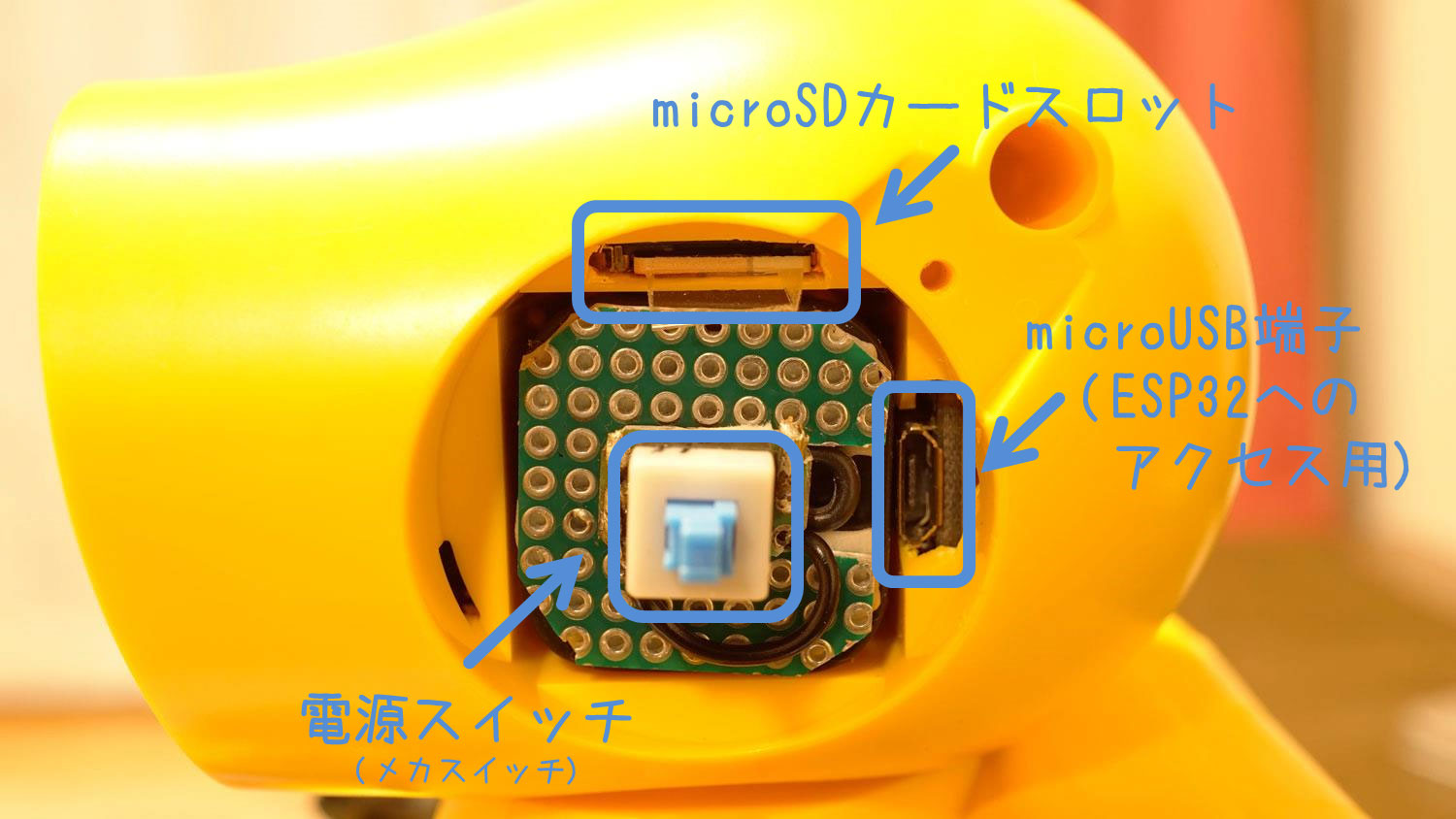
毎回ファームを書き換えるために、頭をぱっかんちょしなくていいよう、耳の裏に全て集めました。
耳を押すと電源が入るよう、スイッチの構造も工夫しています。
もちろん、耳パーツを装着すれば、外からは見えません。

次に、拡張ポート。
頭の基板部分に、ピンコネクタを出しておきました。
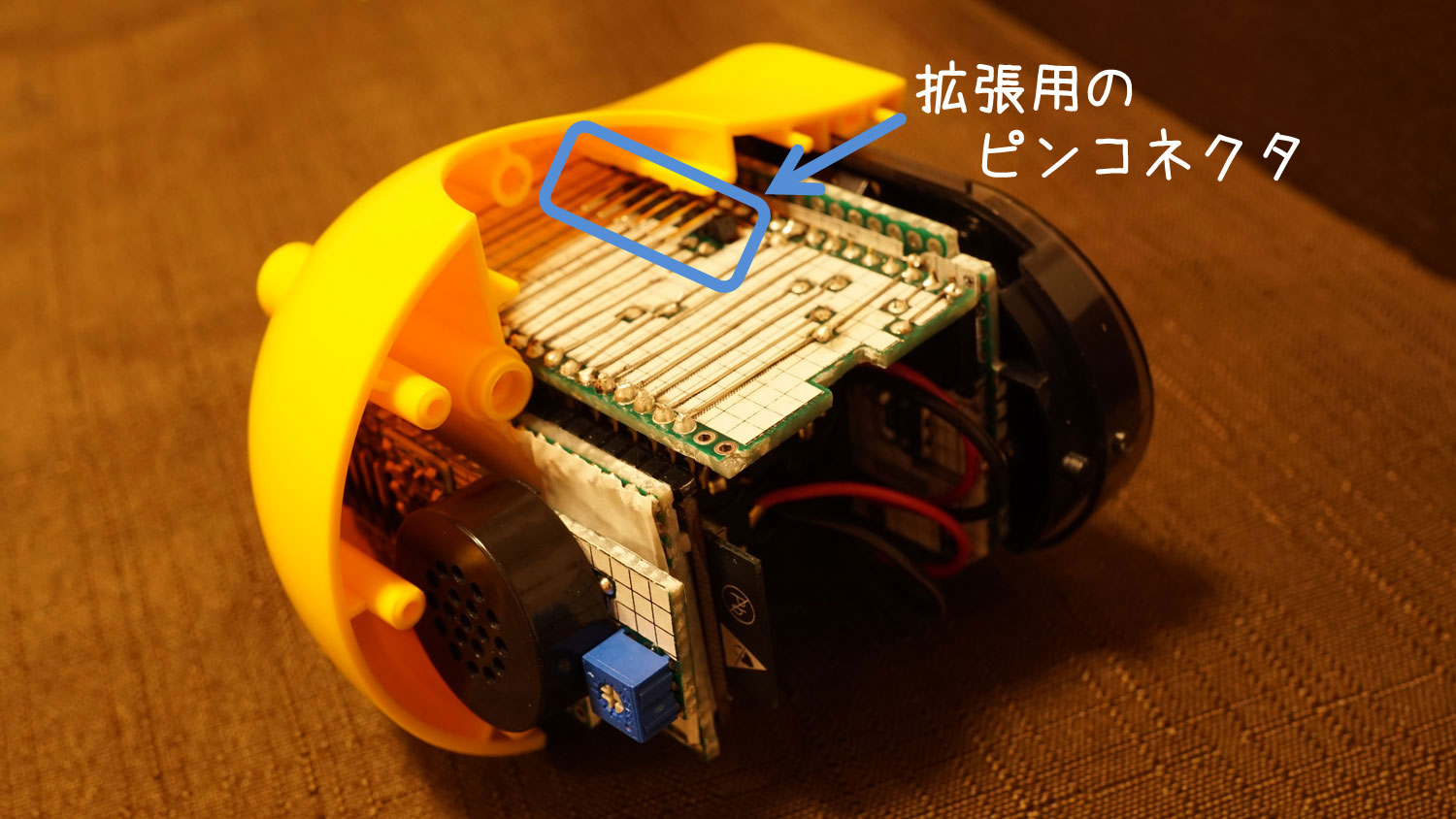
ここにはI2Cなどの信号線を通したので、あとで面白いデバイスをつけて機能を拡張してみようと考えています。
今のところ、9軸センサのMPU9250をつけて、磁気センサとか加速度センサでフォロ君の動きをとらえてみようかな、と思っています。
あとは、顔の部分。
一応、スペースは空けてあって、まだセンサなどはつけていません。ここも賢くなる予定です。
さてはて、まだまだ成長の余地がたくさんあるフォロ君。
今後どうなっていくか、乞うご期待あれ。

結構、我が家もロボットでワイワイ賑やかになってきました。みんな、仲良くしようね。
では、また次回をお楽しみに。