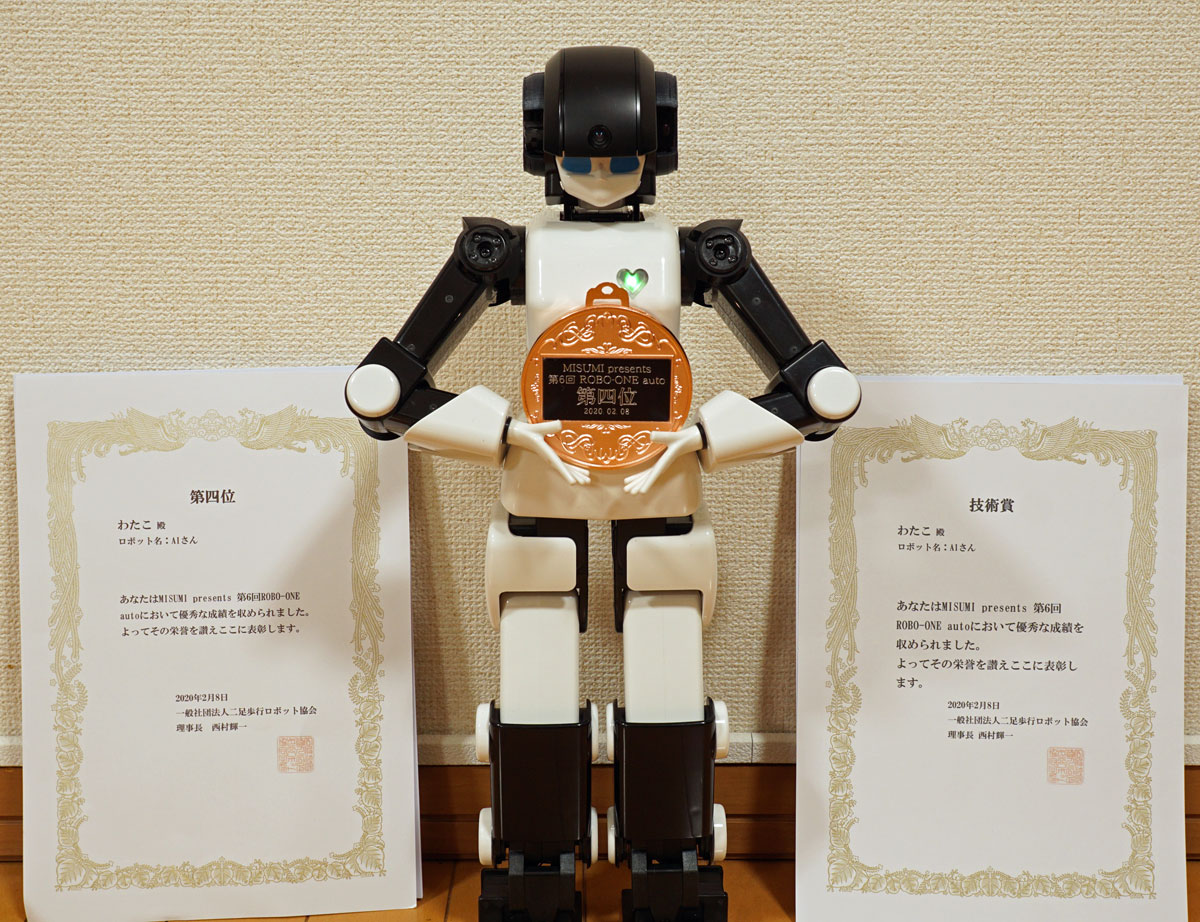
第6回ROBO-ONE auto予選突破&技術賞を頂きました!
ここ半年間、ずっと取り組んできた「プリメイドAI」の改造について、一つの区切りとして「第6回 ROBO-ONE auto」に出場してみました。
結果、予選突破(+決勝トーナメントは速攻負けましたがおまけの4位)に加え、技術賞を頂くことができました。
この予選の様子を、アルゴリズム解説付きの動画にしてみました。
(元の動画をご提供くださったNEEY介様、山口辰久様、ありがとうございました!)
今回の課題は、複数のパネルの中から「自律動作により、KHRというロボットが立っている画のパネルを認識し、それを2分以内に倒す」という競技でした。
(他の物体を倒したらペナルティがあったり、認識せずにひたすら倒すような動作はNG)
動作の解説については、ログをとっていたわけではないのですが、AIさんの頭のサーチの仕方や胸のLEDの色(戦略により色が変わる)、センサの配置や組んだシーケンス的な観点から、ほぼほぼ間違いないと思います。
起き上がり動作を作っていなかったので、転んだらそこで試合終了な状態の中、いきなりペットボトルをひっかけたときは「あ、終わった…。」と思ったのですが、そのあとズリズリと最後まで頑張ってくれました。
短い期間で突貫で作ったアルゴリズムだったのですが、逆にあまり込み入った事をしなかったのも、吉と出たような気がしています。(時間があればSLAM的な動作でステージ内を探索、なんてことを考えていたが、2分以内は難しそう…)
4位という順位について
ちなみに、決勝トーナメントは当初全く出る気がなかったのですが(トーナメントはロボット同士が自律して戦う競技なのですが、それ用のアルゴリズムを全く入れてない)、周りの方々からの出場お勧めの言葉を頂きつつ「確かに、とりあえず予選と同じアルゴリズムで動いとけば、相手を障害物とみなして逃げ続けられるんじゃね?(相手の自滅狙い)」なんて思いから、出てみることにしました。
…結果は開始10秒くらいで距離を詰められ、転んでおしまいでした…。その時相手だった方(森永さん)がそのまま優勝されたので、仕方ないよな…。
AIさんが頭を回しながらのーんびりサーチしている間に、ステージの端からずずいと速攻で間合いを詰めてくる森永さんの検出アルゴリズムは衝撃的で、機会があればお話を伺ってみたい…。
という事で、最終的にはトーナメントの組まれ方的に4位を頂きましたが、これはおまけのようなものなのです。(勝てる感触が全くなかったので、3位決定戦は辞退させて頂きました)
技術賞について
こちらは、その場で発表されるのでとても驚いたのですが、予選でのAIさんの動きについて「私どもが見た限りでは、唯一ターゲットを発見して、倒すことができた、という点を評価させて頂きました」という、とてもありがたいお言葉を頂くことができました。
まさに、そこに力を入れて今回の大会に臨んだので、その点を評価して頂けたのはとても光栄なことでした。ありがとうございました!
控室でのTwitter上の方々との出会い
元々、プリメイドAIの激安2万円セールの存在を知ったのはTwitterで、そこで多くの方々がハックされているのを拝見していました。
ちょうどその頃、二足歩行ロボットに興味を持ち始めたことと、deveminさんがAIさんのマイコン乗っ取り方を確立した事から「こりゃ面白そうだ」と私も取り組み始めました。
(その頃の記事はこちら)
その後も、プリメイドAI改造を通してロボット界隈の様々な方との交流が広まり、ついに初めて控室でお会いすることができました。
Twitterや本などで「すごいなぁ…」と感じていた皆様の改造・自作ロボットを直接拝見し、また色々と技術的な交流をさせて頂くことができて、ここ数年でみても最も脳が活発に動くとともに、とても楽しい時間を共有させて頂きました。
(ディズニーランドに行くより1000倍楽しいぞ…)
皆様、本当にありがとうございました。
プレゼント頂きました!
deveminさん と かずさん から、「よろしければ」という事で、AIさんパーツを頂きました!

ちょうど転倒で頭のロール軸パーツが破損していたものをdeveminさんに、頭改造時の穴あけ失敗を補う頭パーツをかずさんから、それぞれ頂きました。
また以前には、ぽんださんからAIさんのマイコン基板を頂いたりと、皆さん本当にありがとうございました。ぜひ活用させて頂きたいと思います!
今後について
今回の大会を終えて、大分やり遂げた感が強いのですが、やりたいことはまだ結構あったりします。
やはり、最後まで戦いにはあまり興味が湧きませんでした…。どちらかというと、自律動作について、もっと色々と賢いことができるようになると面白そうだなぁ、と感じています。
最初はボールを認識して自分で持ち上げたり、もう少し発展系として、AIさん二台でボールをパスしあったりできたら面白いなぁ、なんて思っています。
ということで、今後はもう少し認識系の勉強と、動力学的な部分の知識を習得していけたらなぁ、と思っています。
これと並行して、CNCフライス盤や3DCADの使い方なども勉強していくと、今後色々と製作の幅が広がっていくかしら。
後は、今回のROBO-ONE autoのアルゴリズム含め、今まで学んだ二足歩行ロボットの知識をこのブログの記事にまとめていきたいと思っています。
ロボットたちの写真
最後に、一緒に撮影させて頂いたロボたちの写真を載せて、終わりたいと思います。
皆様、本当にありがとうございました。